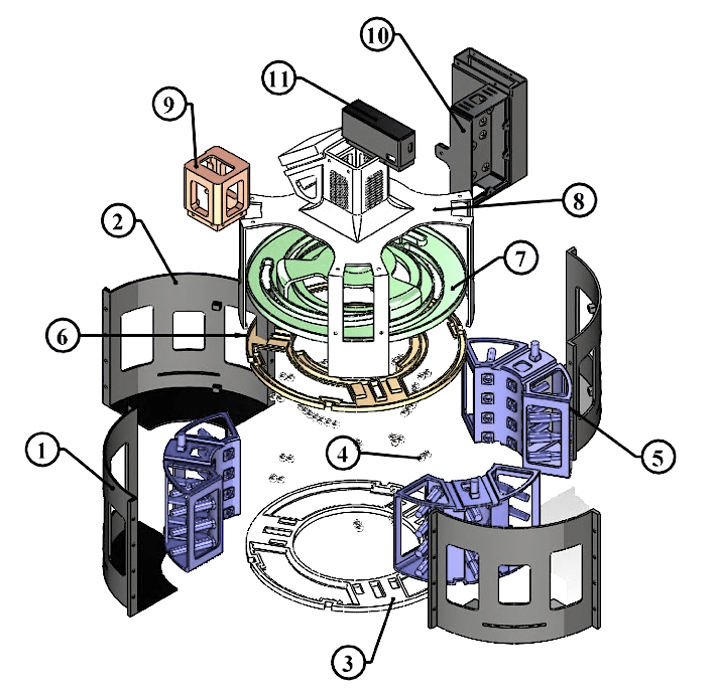
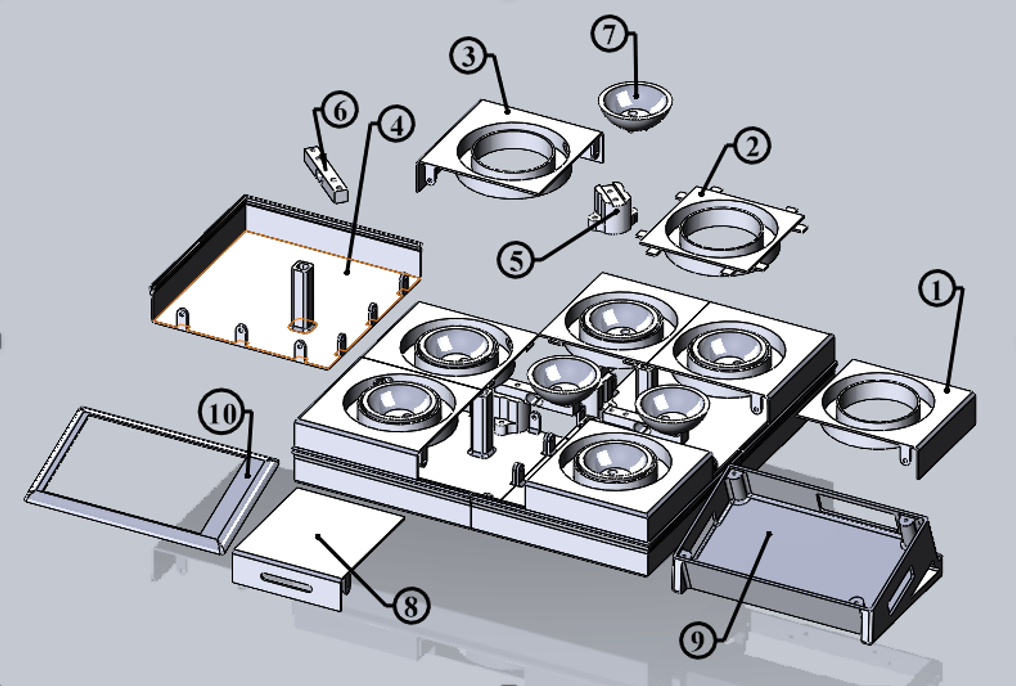
Novel Rotary Mechanical Gripper
Novel mechanical robotic end-of-arm tool for grasping various-shaped objects with both Force-closure and Form-closure grasping.
- Brainstormed and imagined the concept of the gripper inspired by the camera's shutter.
- Designed CAD models of the components using SolidWorks.
- Improved models using GD&T techniques for assembly.
- Analyzed and applied DFMA and lean principle throughout the process.
- Performed root cause analysis for every visible and possible failure mode.
- Printed the parts using PLA and ABS materials for their light and strong nature which is affordable too.
- Assembled and tested the system using an open-loop stepper motor system.
Publication: Applied Science MDPI
Featured Video
Provisional Patent Application No. 63/514,458
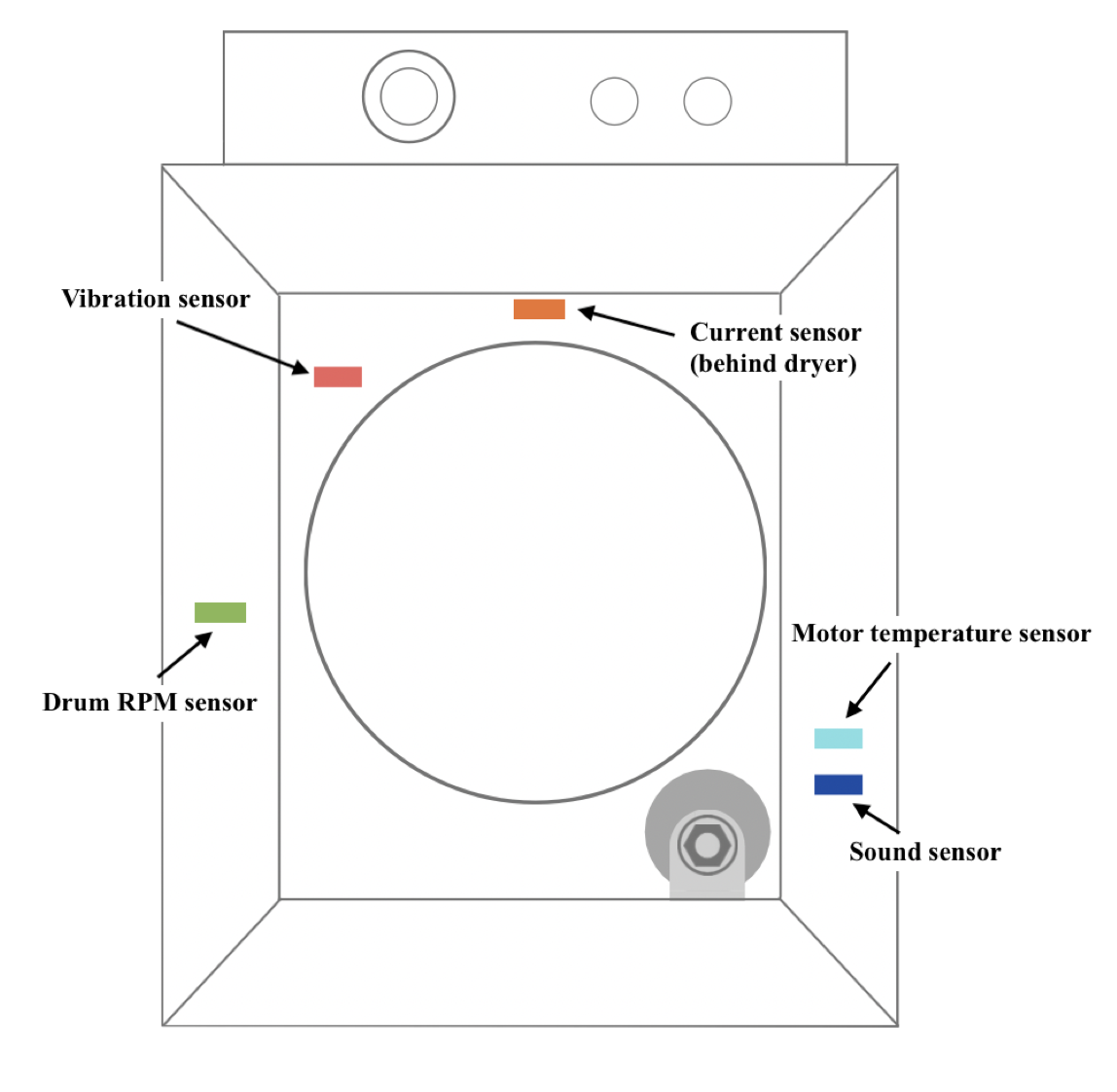
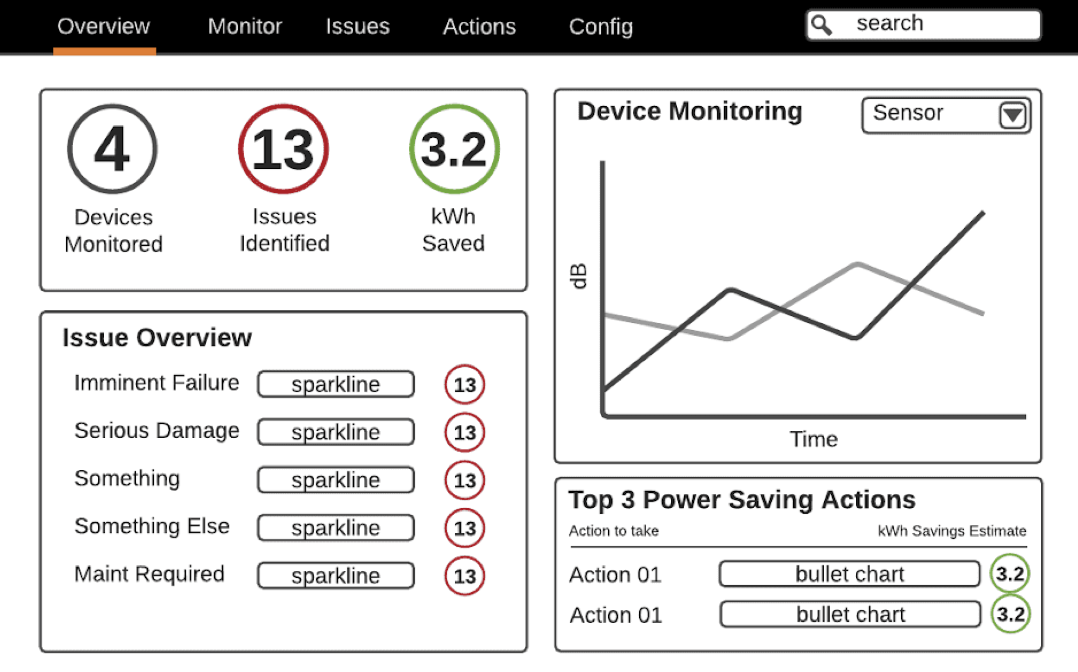
Automated Predictive Maintenance System
An IoT-based predictive maintenance system that detects anomalies in machines to inform about possible machine failure.
- Collaborated with the team in designing the mechanical system required.
- Shortlisted 5 sensors: IR break beam sensor for RPM, IR temperature sensor, DHT sensor, Accelerometer, and Current sensor for power monitoring.
- Implemented all sensors on Raspberry Pi 4, using Python programming.
- Designed and built the custom circuit board on PiHat, soldering wire less than 1 cm.
- Collected and used the data to train the machine-learning model.
Publication: CAINE 2021
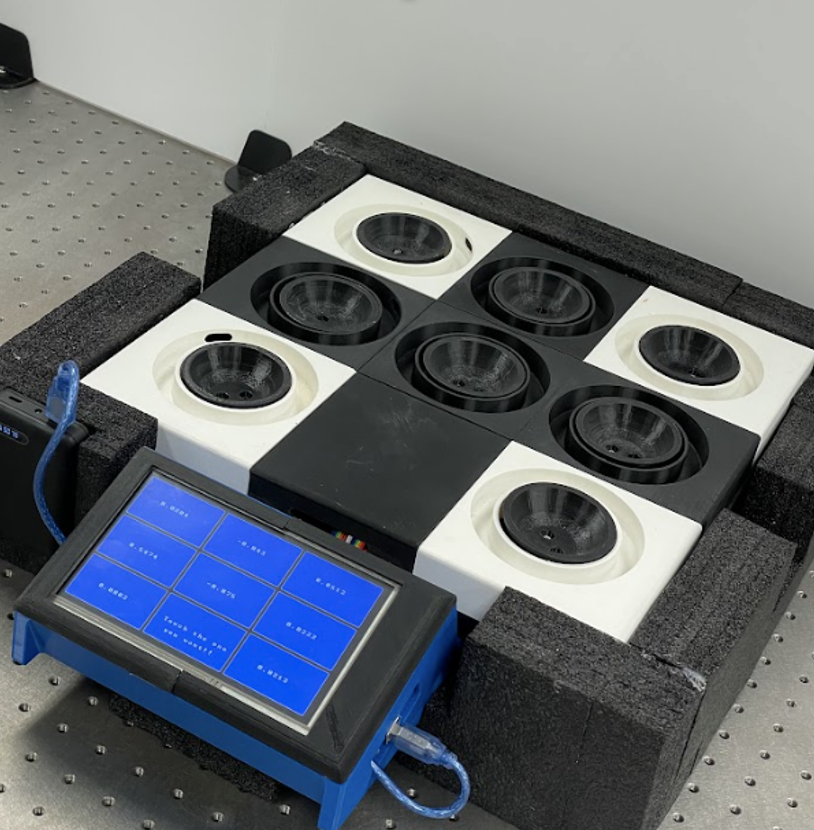
Smart Packaging Palette
Reinforced with image processing and optimization algorithm, the smart palette facilitates customers via customized touchscreen HMI.
- Designed on SolidWorks, using GD&T and DFMA techniques.
- Configured the Arduino-based system for 8 load cells and the touchscreen interface.
- Programmed a multi-layered HMI for load cell's data display, sent input, and view action status.
- Assembled and tested the system.
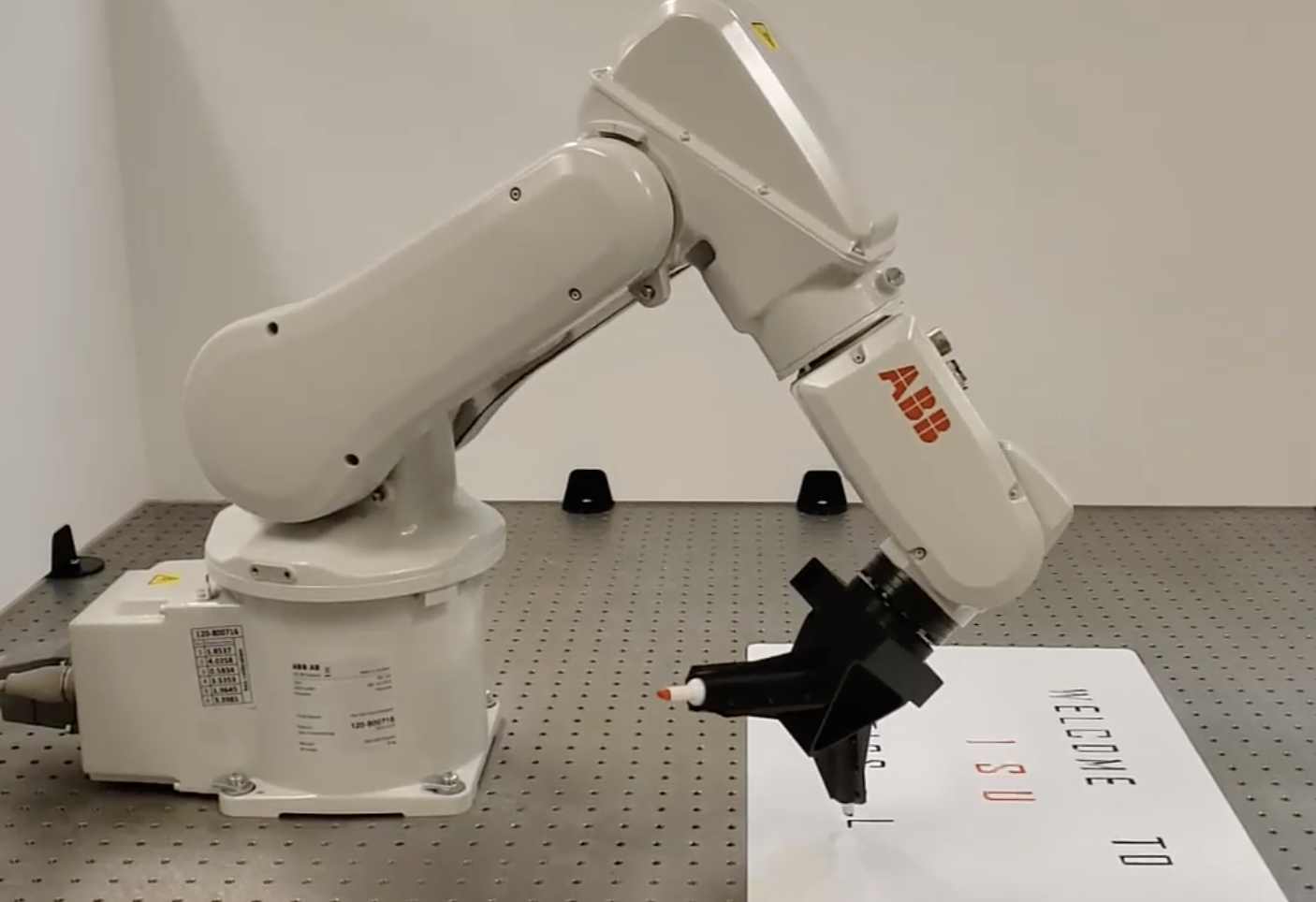
Industrial Robot Programming
ABB Robotstudio-based programming that instructs ABB IRB120 to welcome ISU Robotics Lab visitors.
- Calibrated all 6 axes of the robotic arm.
- Defined the Robot's workspace.
- Defined the tool center point.
- Defined robotic target points for different action locations.
- Programmed the robot based on all the defined entities, using ABB RobotStudio
Featured video
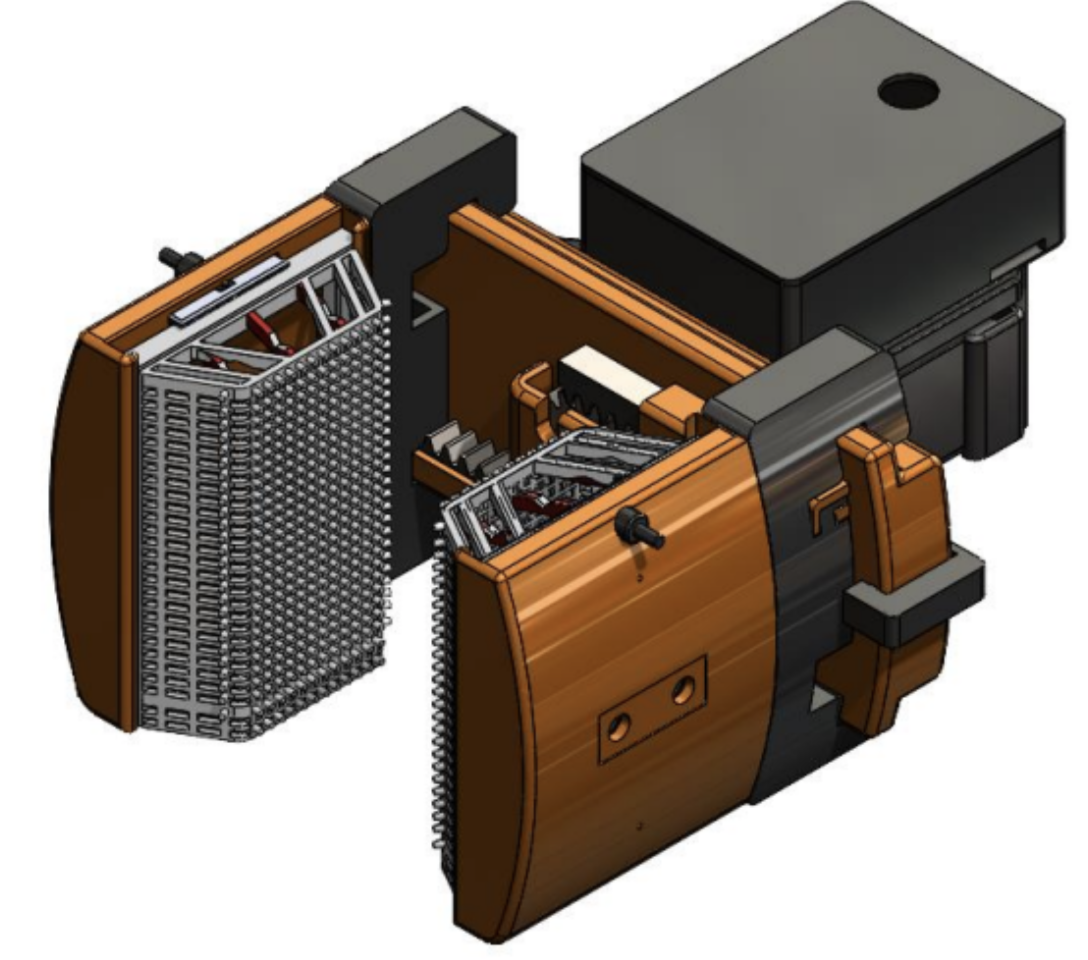
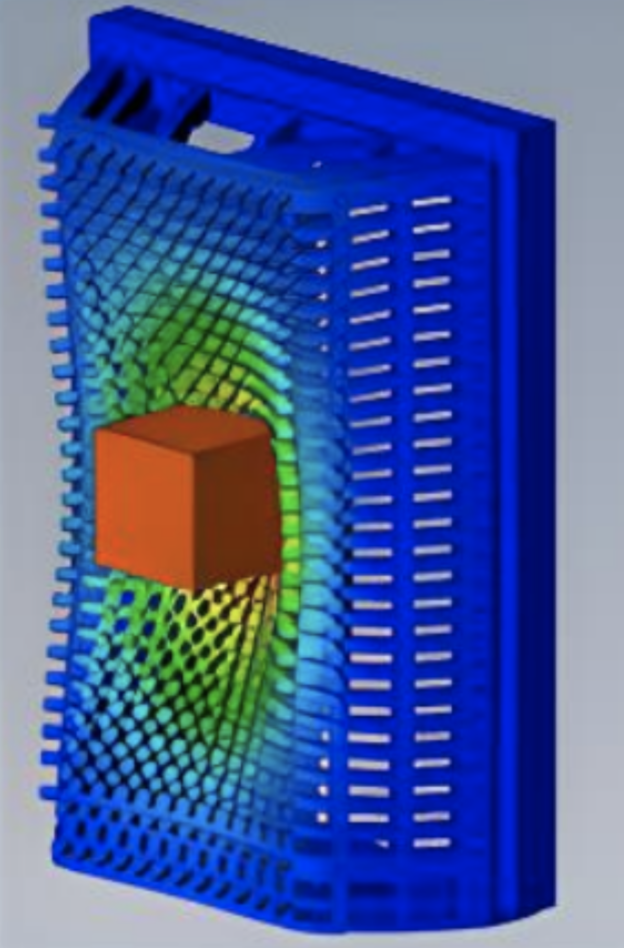
Compressible soft gripper
A novel grasping mechanism for Force-closure grasping.
Featured video
Publication: Applied Science MDPI
Provisional Patent Application No. 63/514,467
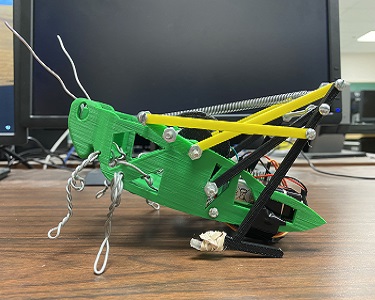
Hopper-Bot
A small robotic resemblance of a grasshopper.
- Designed in SolidWorks and built the prototype using additive manufacturing techniques.
- Inspired by an actual grasshopper, the 5-bar kinematic mechanism is developed.
- Configured an Arduino-based DC Servo motor system for actuation.
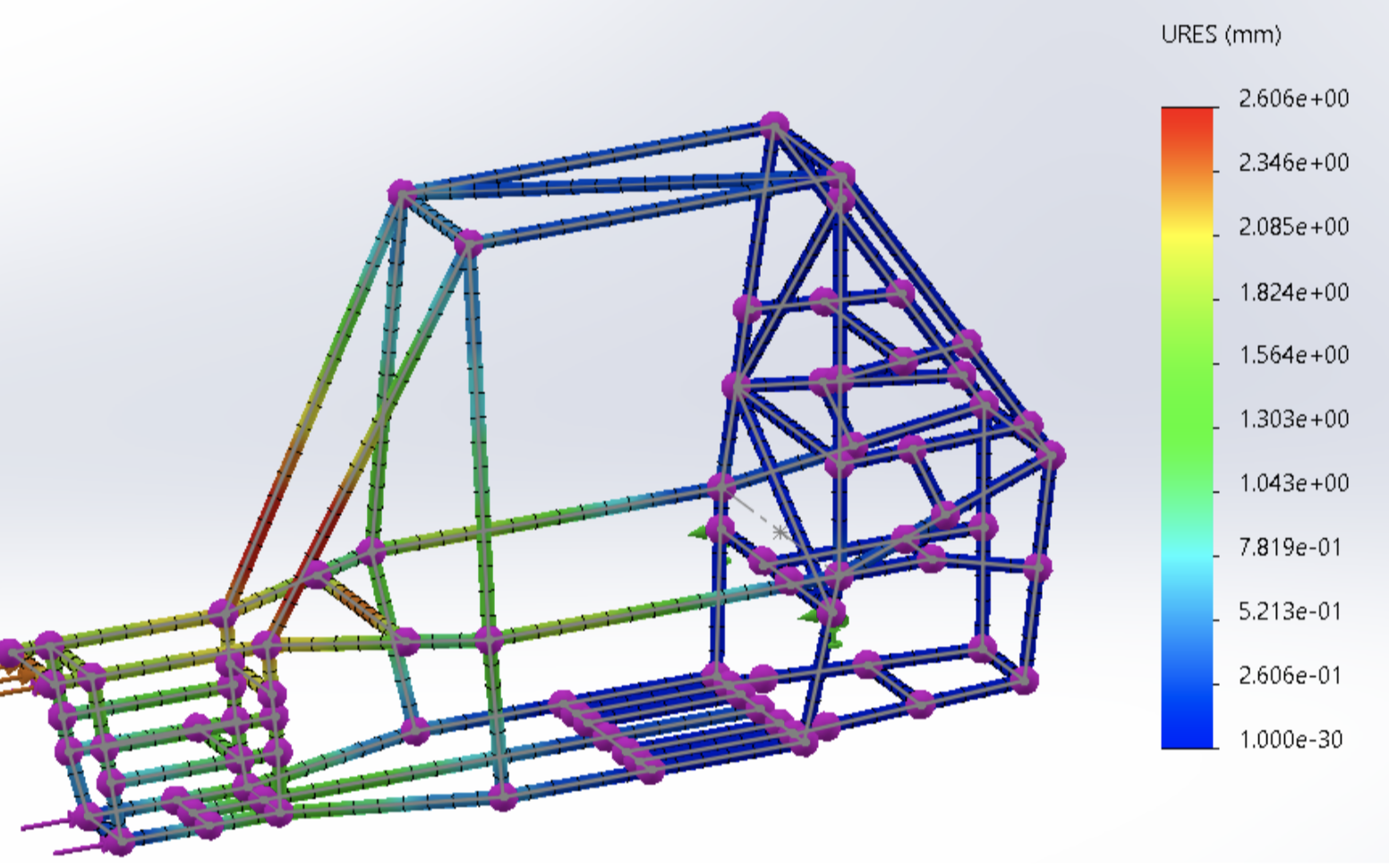
Baja ATV Redesign: RWD to 4WD
Front suspension re-design to accommodate drive shaft.
- Designed and simulated in SolidWorks
- Adjusted caster and camber angles
- Re-positioned shock mounting positions for front suspensions